自動走行安全性評価
自動運転システムの安全性評価(SAKURA) (2018-2025)
SAKURA =(Safety Assurance KUdos for Reliable Autonomous vehicles)
本プロジェクトは,経済産業省委託事業「自動運転システムの安全性評価基盤構築に向けた研究開発プロジェクト」において、平成30年度から令和7年度までの8年間採択されたものである。
開発の狙い
自動運転システムの実用化に向けては、安全性の確保が最も重要な課題となっている。自動運転システムに求められる安全原則は、「自動運転車両は、その運転領域において、合理的に予見可能かつ防止可能な交通事故を発生させてはならない」と定められている。
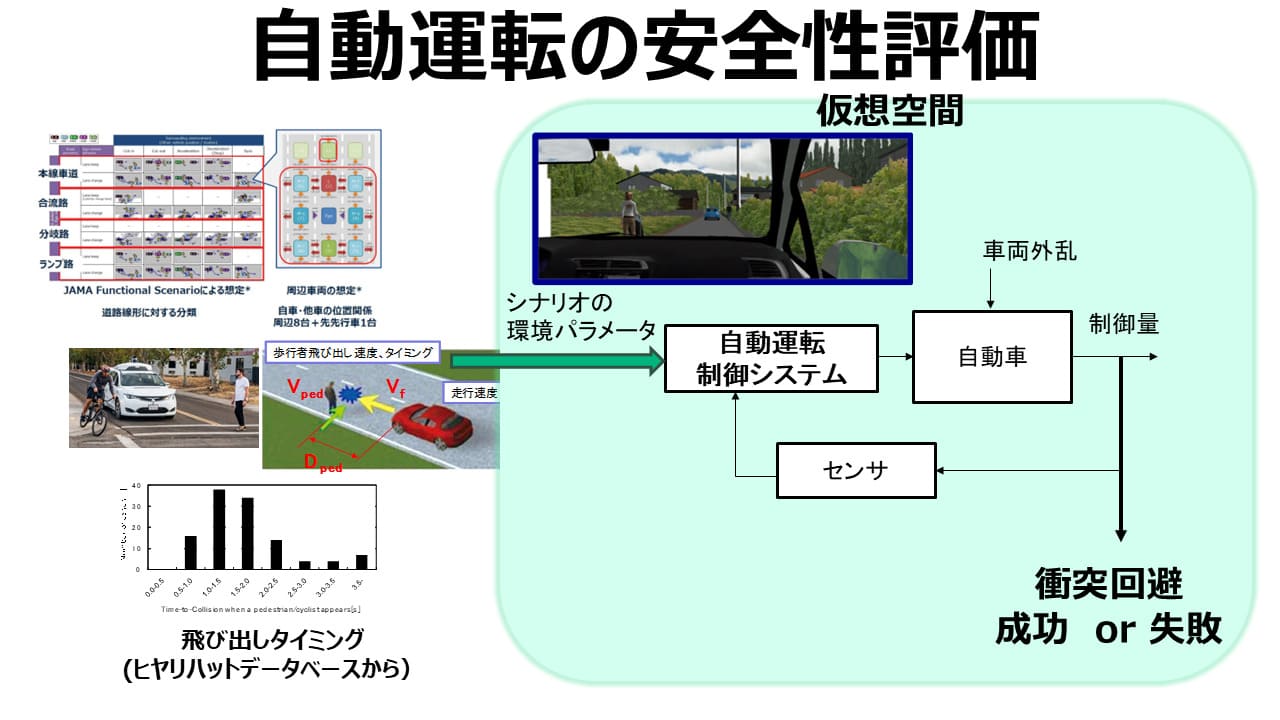
一方で、自動運転システムに関する安全性評価は「認知」「判断」「操作」を自動システムが行うため、実車走行による評価では限界があり、仮想環境での走行シミュレーションが期待されている。
経済産業省が進めているSAKURAプロジェクトでは、自動運転の安全性評価手法を確立し、産官学連携で社会実装を加速させることを目的としており、自動運転サービスの導入ロードマップの実現に向け、実証実験の支援、協調領域の課題解決など、産学官によるオールジャパンの取り組みを推進している。
過去には、人間ドライバーが遭遇する危険場面において、急ブレーキや回避操舵によって衝突を回避し、ヒヤリハットにとどまった事例が多数報告されている。同様の場面において、ロボットタクシーに代表される自動運転車両においても、人間と同等あるいはそれ以上に適切な衝突回避操作を実行することが求められる。
そのため、自動運転車に対する周囲の車両の相互動作などを記述した、交通外乱の安全性評価用のテストシナリオ(以下、「交通外乱テストシナリオ」)の開発を行い、自動運転システムの安全性評価手法の開発と検証を目指す。東京農工大学では、追突シナリオ、合流・割り込みシナリオ、出会い頭シナリオ、右折シナリオ、対歩行者シナリオに着目してコンクリートシナリオ(Concrete Scenario)構築および安全性評価指標の検討を行っている。
ニアミスデータに基づくACA指標を用いた自動運転システムの安全性評価
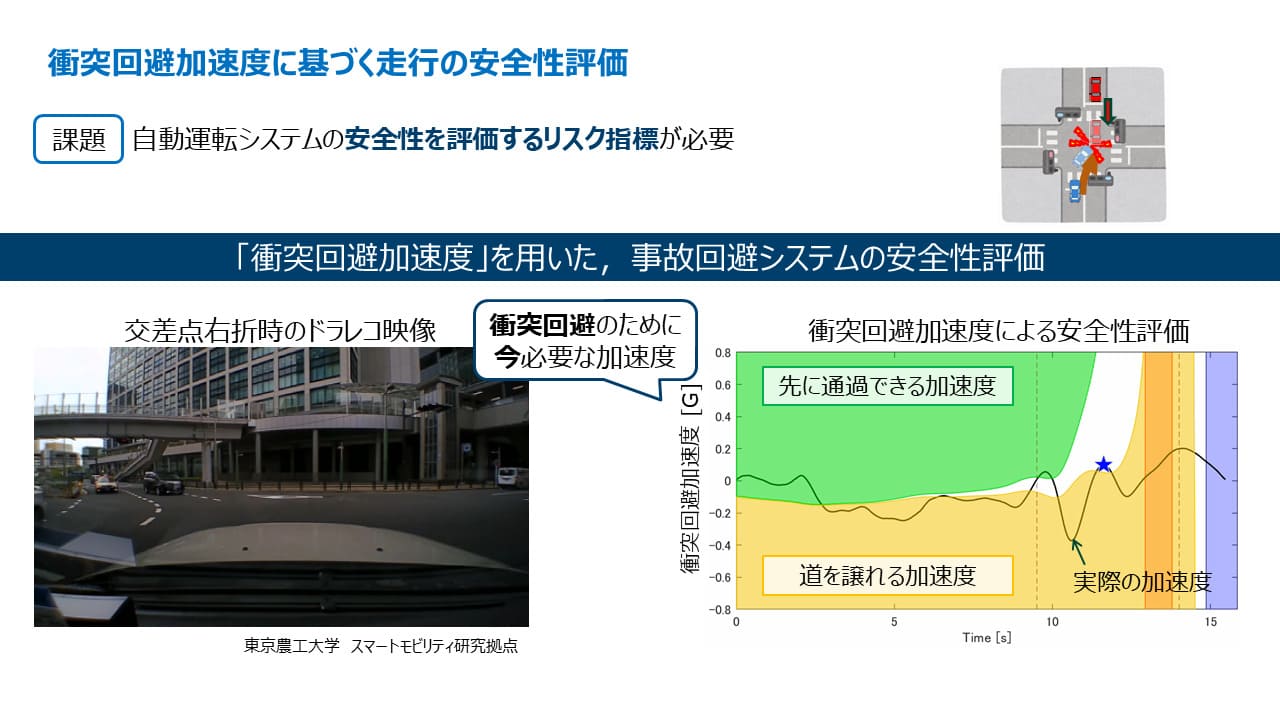
本研究は、安全性評価シナリオのパラメータ範囲の妥当性を確認するための事故・ヒヤリハット事例の分析、ニアミスデータに基づく合理的に予見可能かつ防止可能な交通事故を回避するドライバーモデルの特徴分析、対四輪車・対歩行者の一般道評価シナリオに適用可能な衝突リスク評価指標に関する調査・研究を行った。
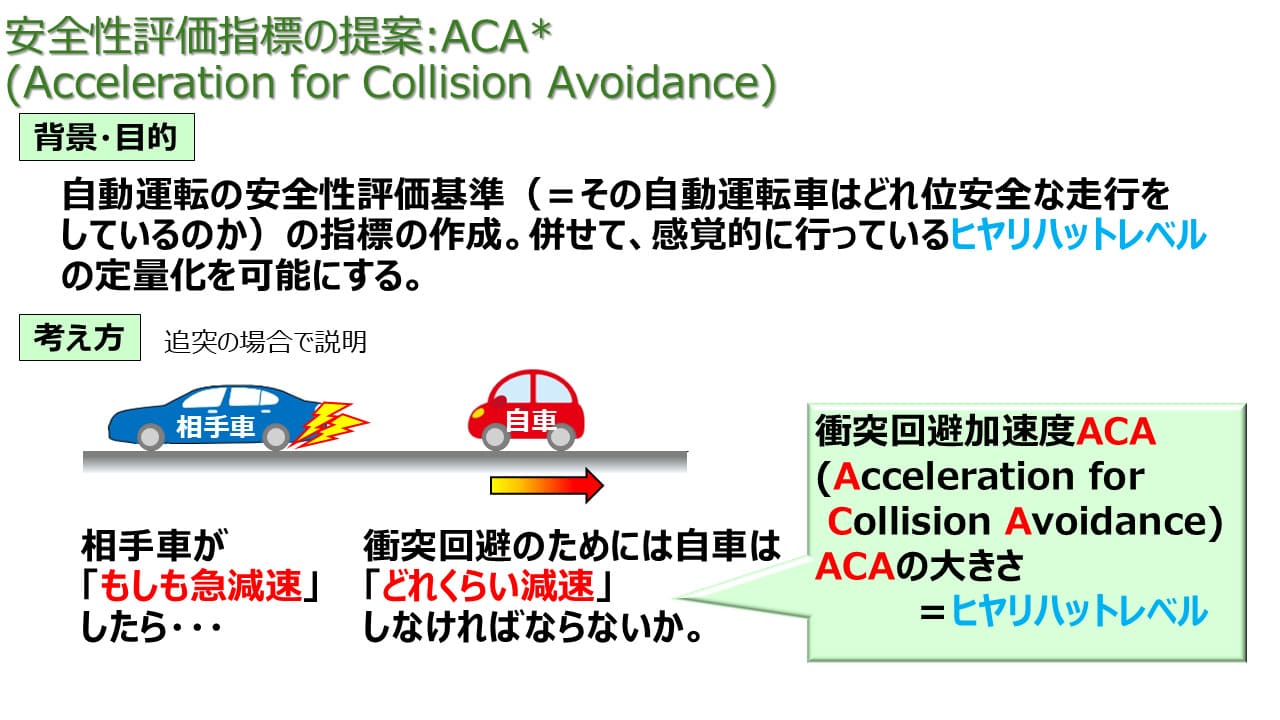
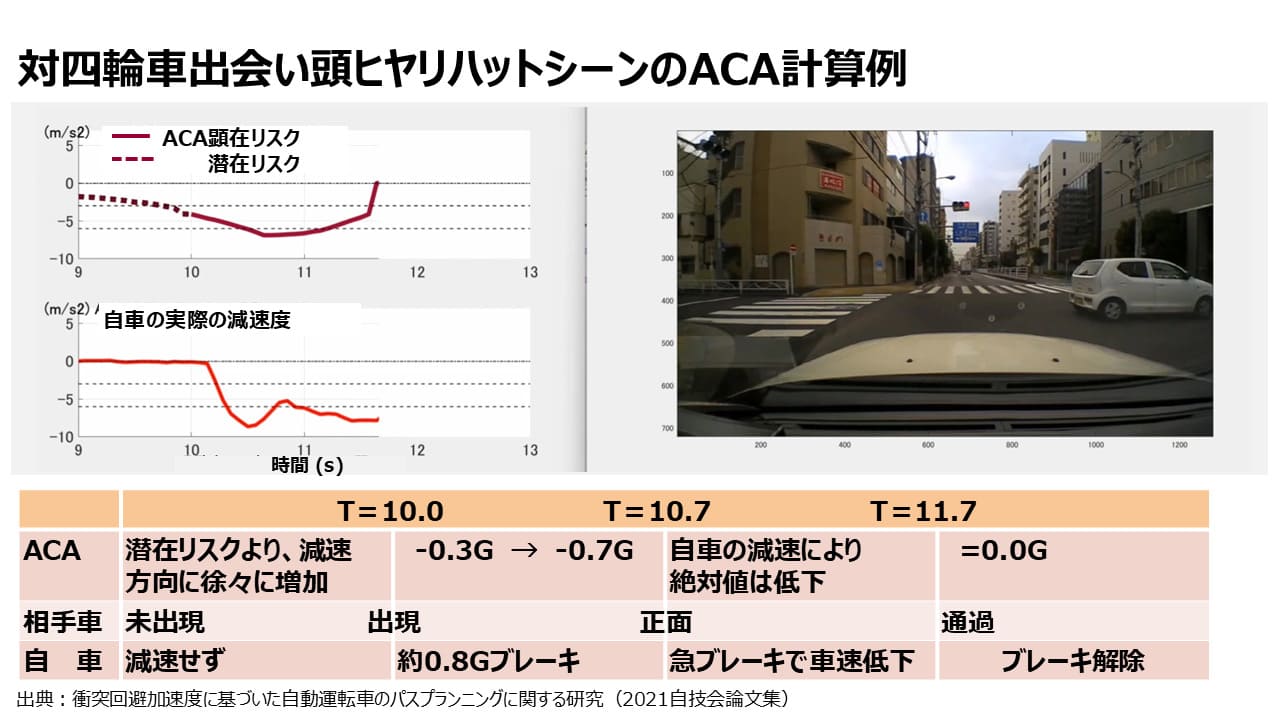
具体的には、ニアミスデータの映像データより、画像処理技術を適用し、ニアミスシナリオ再現のための運動パラメータ、環境パラメータ抽出を行った.さらに,そのシナリオに対し、衝突回避のための加速度(Acceleration for Collision Avoidance: ACA、以下、ACAと呼ぶ)という危険度指標を算出し、各ニアミスシーンの危険度レベルを評価した。
その結果、ACAはリスクシナリオにおける自動運転システムの走行安全性評価基準として有効であることが示された。今後は、ACAを用いた安全性評価手法を自動運転システムの評価に適用していく予定である。
参考:
Rentaro Kuriyama, Daiki Ikami, Xingguo Zhang, and Pongsathorn Raksincharoensak, “Safety Evaluation of Automated Driving Systems During Right Turns at Intersections Based on Acceleration for Collision Avoidance,” Proceedings of the 26th SICE System Integration Division Conference (SI2025), Hiroshima, Japan, December 10–12, 2025, No. 1C1-14.
Shuta Sato, Daiki Ikami, Xingguo Zhang, and Pongsathorn Raksincharoensak, “Safety Assessment of Intersection Crossing Accident Avoidance Systems Based on Acceleration for Collision Avoidance Index,” Proceedings of the 26th SICE System Integration Division Conference (SI2025), Hiroshima, Japan, December 10–12, 2025, No. 1C1-13.
Takashi Imaseki, Safety Assessment Methodology of Automated Driving Scenarios, Proceedings of FAST-zero’23 Symposium,Kanazawa.
COPYRIGHT ©2019 PONGSATHORN LAB. ALL RIGHTS RESERVED.
ページトップへ