最新テーマ
最新テーマ
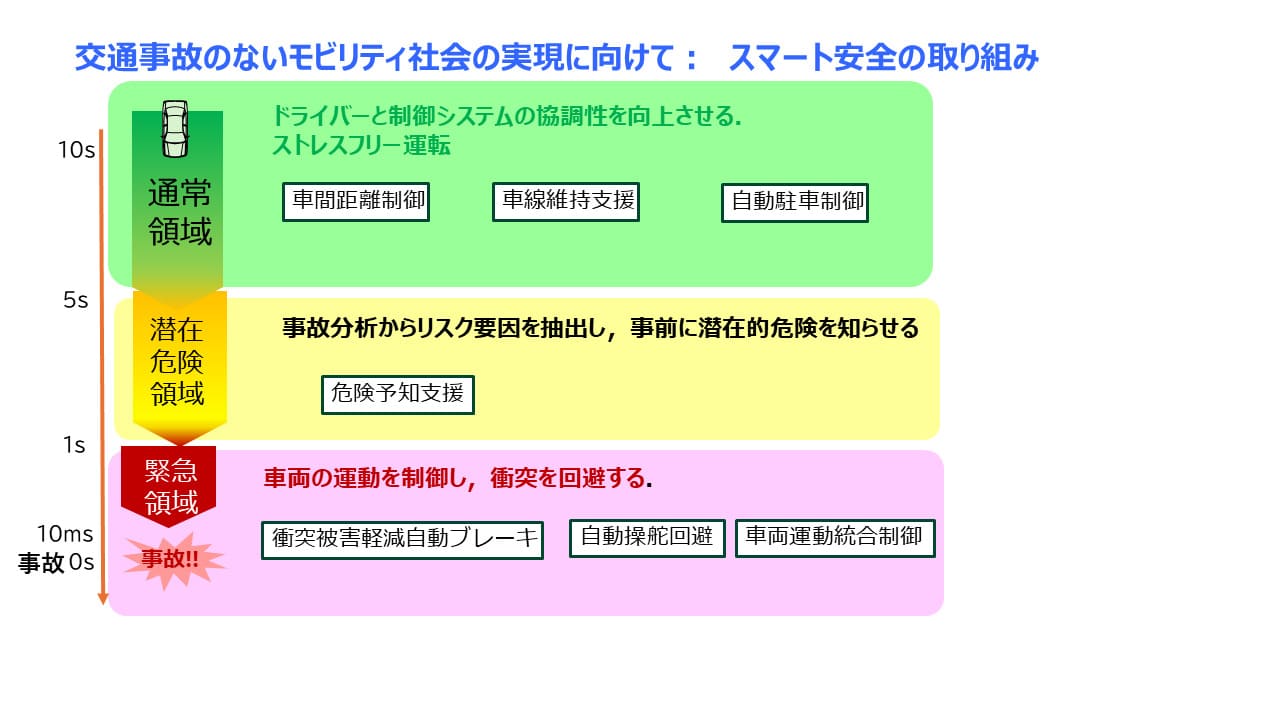
本研究室では、交通事故を未然に防ぐ予防安全システムの研究・開発を行っている。カメラ、ライダー(LiDAR)、GNSS、デジタル地図などの各種センサ情報を用いて車両周辺環境を認識し、学習された運転知能および車両運動制御により、通常運転から緊急時に至るまでドライバの安全運転を積極的に支援する高度運転支援システムを対象としている。
また、ドライビングシミュレータおよび実車による実証実験も行っている。
大型車の車線追従制御の研究
近年、車線維持支援制御(Lane Keeping Assist System:LKAS)を搭載した乗用車が広く普及している。
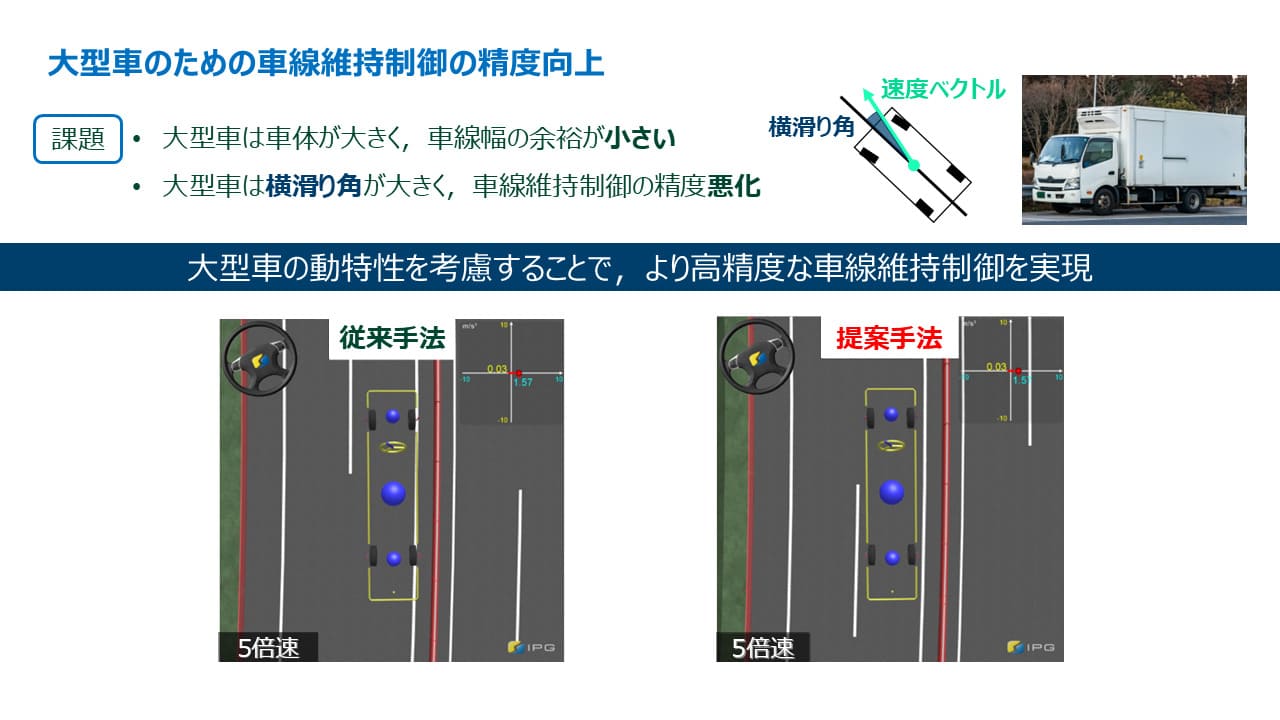
乗用車向けの一般的なLKA手法として、前方注視点を用いて目標ヨーレイトを算出する手法がある。この手法では、一般的に乗用車の車体横滑り角は小さいとして、車体横滑り角を無視している。
しかし、ホイールベースが長い大型車は、大きな車体横滑り角を発生するため、その横滑り角を無視して車線追従制御を行うと、大きい追従誤差が残ってしまう問題がある。
そこで本研究では、旋回時における定常および過渡的車体横滑り角を考慮したLKAS制御手法を提案し、従来手法に対する提案手法の有効性を確認した。
参考:
Pongsathorn Raksincharoensak, Makoto Amemiya, Shunsuke Tsukuda and Yutaka Hamaguchi, Enhancing Automated Lane Keeping Control Performance of Heavy-Duty Trucks Considering Dynamic Characteristics of Vehicle Sideslip Angle, Proceedings of 8th International Symposium on Future Active Safety Technology toward zero traffic accidents (FAST-zero’25), Arles, France, September 23-26, 2025.
狭路におけるすれ違いの自動運転の経路計画・制御に関する研究
自動車の普及が進む一方で、過疎地域における公共交通縮小や高齢者ドライバの増加により、移動弱者の増加が社会問題となっている。
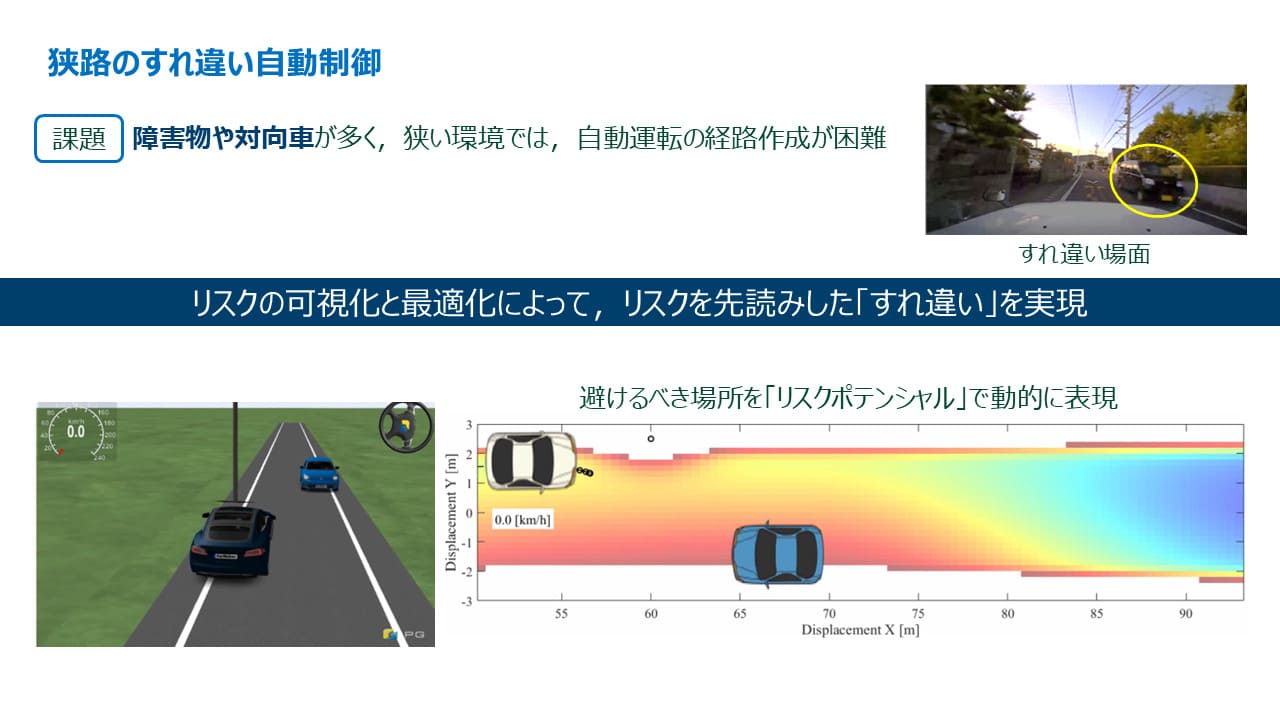
自動運転技術の発展より、LKASやACCが実用化されているが、市街地のような動的かつ狭い環境への適用は依然として課題が残されている。
本研究では、リスクポテンシャル場に基づく最適化制御を拡張し、狭路において安全に「すれ違い」を行うための運動制御を構築した。
逐次二次計画法を用いてヨーレイトおよび加速度を最適化することにより、適切なすれ違い動作を実現する手法を提案した。
さらに、シミュレーションにより提案システムの有効性を確認した。
ソーシャルフォースモデルに基づく自動運転の経路生成の研究
近年、日本での社会的問題として、少子高齢化の急速な進行に伴う地方部における公共交通の維持困難や、物流業界における深刻なドライバ不足が挙げられる。これらの課題に対する解決策として、無人自動運転移動サービスへの期待が高まっている。
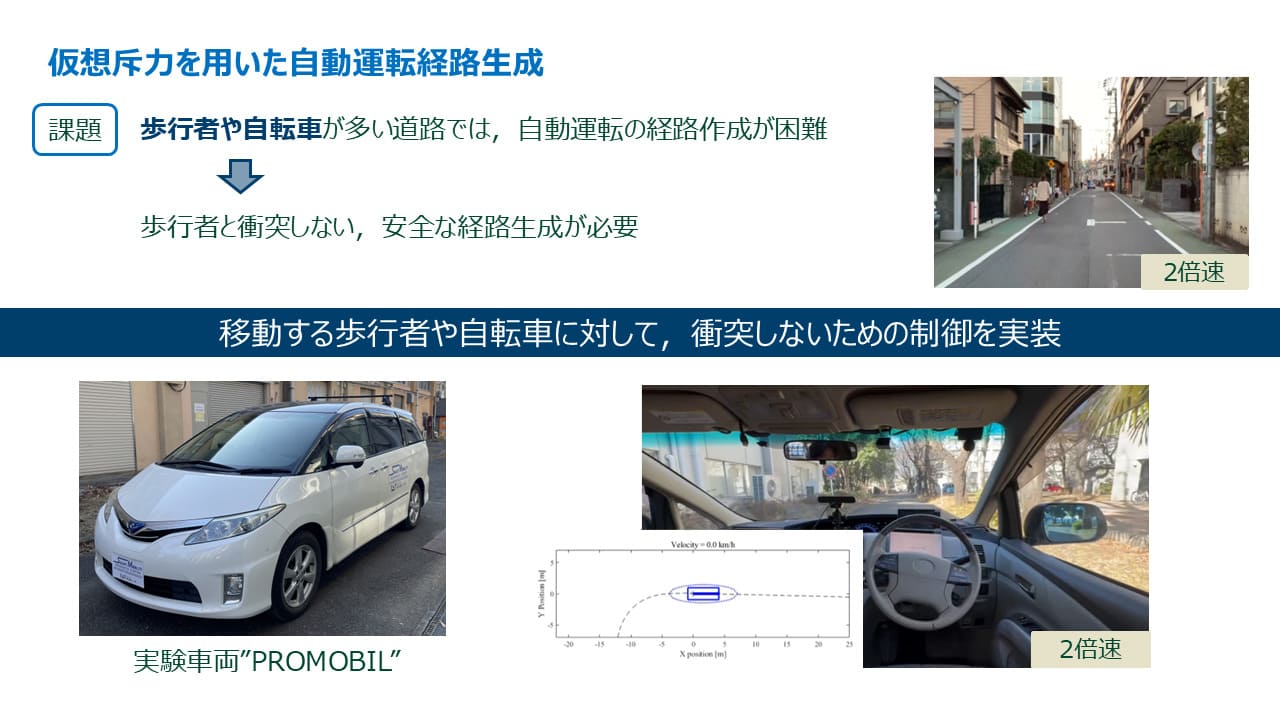
一方で、歩行者や自転車などが混在する都市部の狭い市街地道路における走行は技術的難易度が高いという課題がある。
本研究では、Social Force Model (以下、SFM)に着目する。建造物の設計などにおいて、多数の歩行者が出口に向かって移動する際の群衆行動をシミュレーションで再現する際に使用されるモデルである。本研究では、このモデルに基づき、歩行者や自転車などが混在する道路における自動運転走行制御システムを設計している。
さらに、交通参加者に対する仮想斥力に加え、走行可能領域を考慮した、より安全かつ自然な経路計画手法を考案し、実車実験によりその制御システムの有効性を検証している。
参考:
Shumma Takeda, Yohei Fujinami, Pongsathorn Raksincharoensak, Path Planning to Control Automated Driving Vehicle by Applying Social Force Model, Proceedings of 8th International Symposium on Future Active Safety Technology toward zero traffic accidents (FAST-zero’25), Arles, France, September 23-26, 2025.
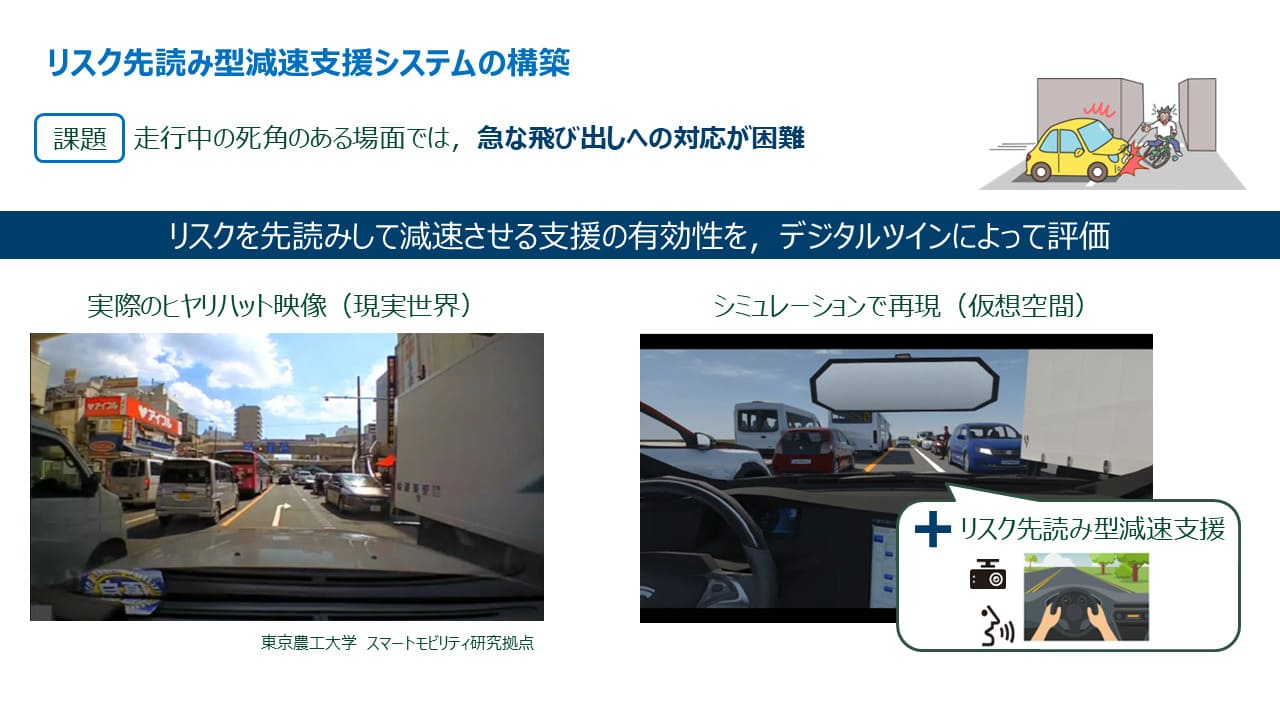
リスク先読み型減速支援システムの構築
本研究は、実路走行時に発生したヒヤリハットデータを基に、歩行者等の飛び出し速度を予測するアルゴリズムを構築し、これを減速支援制御に応用することを目的としている。
本システムでは、死角が検知できた際に、特定の位置までに安全な速度へ減速させることで、事故リスクの低減を図る。
見通しの悪いさまざまな種類の道路環境に応じて適切な安全速度を決定するためには、車載カメラなどのセンサが周辺環境を認識した瞬間に、飛び出し速度を即座に算出可能なアルゴリズムの構築が求められる。
本研究では、ヒヤリハットデータをデジタルツインによって再現し、リスク先読み型減速支援システムの有効性を確認している。
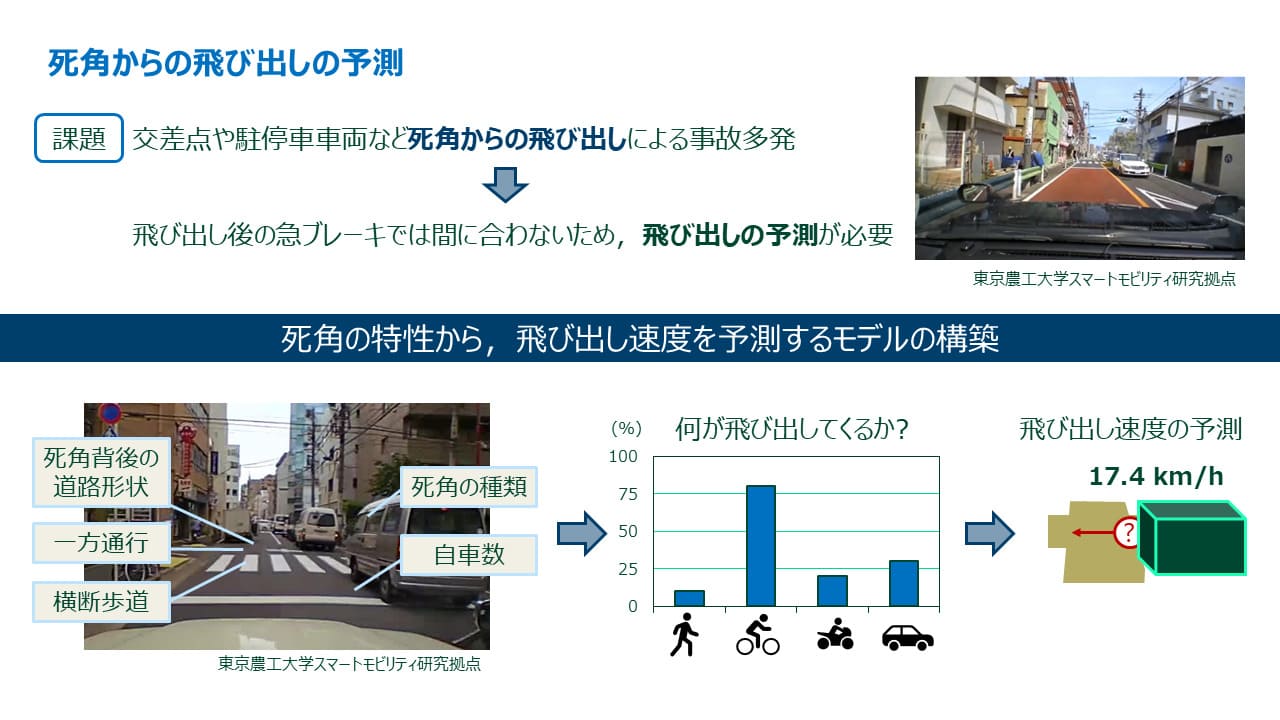
死角からの飛び出しの予測手法
出会い頭事故は、遮蔽物によって飛び出してくる対象の発見が遅れやすく、回避行動を行うための猶予時間が短いという特徴がある。そのため、既存システムでは十分な事故回避が難しい場合がある。
本研究では、出会い頭事故のリスクを低減する知能化運転支援システム実現を目標とし、死角から飛び出す対象の特性を予測するモデルの構築に取り組んでいる。
公道走行で収集されたヒヤリハットデータに基づき、交通環境の状況(コンテキスト)と飛び出し対象の特性との関係を確率的に表現することで、飛び出し対象の特性を推定できる可能性を示している。
参考:
太田 龍希,谷川 愛希,Pongsathorn Raksincharoensak, 永井 正夫,藤波 洋平,山崎 貴也,樋口 実,交通環境文脈を考慮した死角からの交通参加者飛び出し速度予測手法の検討,2024年自動車技術会秋季大会学術講演会, 仙台, 2024年10月25日.
高度運転支援システム使用時のドライバの運転行動解析
近年普及が進む車間距離制御(Adaptive Cruise Control:ACC)は、ドライバの監視を必要とする一方で、機能の過信により前方不注視に陥る傾向があることが指摘されている。しかし、ACC使用により衝突事故率が低減するという報告もあり,その安全効果のメカニズムは十分に解明されていない。
そこで本研究は、ACCがドライバの行動や判断にどのような影響を与え、事故回避につなげるのか、そのメカニズムの解明を目的としている。
具体的には,ドライビングシミュレータ実験を通じて、前方不注視中の高リスク場面でのドライバの回避反応を解析した。さらに、ドライバの前方不注視状態に適応した、より安全な車間距離制御を提案し、その運転支援システムの受容性を評価している。
参考:
新井 乃理花,辻出 翔之介,藤波 洋平,Pongsathorn Raksincharoensak,菅谷 文男,沖田 敏宣,井上 慎太郎,上地 正昭, 車間距離制御使用時の減速操作がドライバの前方衝突事故回避行動に与える影響の解析, 2024年自動車技術会秋季大会学術講演会, 仙台, 2024年10月25日.
N. Arai, S. Tsujiide, Y. Fujinami, P. Raksincharoensak, F. Sugaya, T. Okita, S. Inoue, M. Uechi, Safety Enhancement of Adaptive Cruise Control Adapted to Driver Eyes-Off State, J. Robot. Mechatron., Vol.37 No.5, pp. 1162-1171, 2025.
Norika Arai, Pongsathorn Raksincharoensak, Masao Nagai, Does Automated Lane Keeping System Increase Safety During Distracted Driving?, Proceedings of 8th International Symposium on Future Active Safety Technology toward zero traffic accidents (FAST-zero’25), Arles, France, September 23-26, 2025.

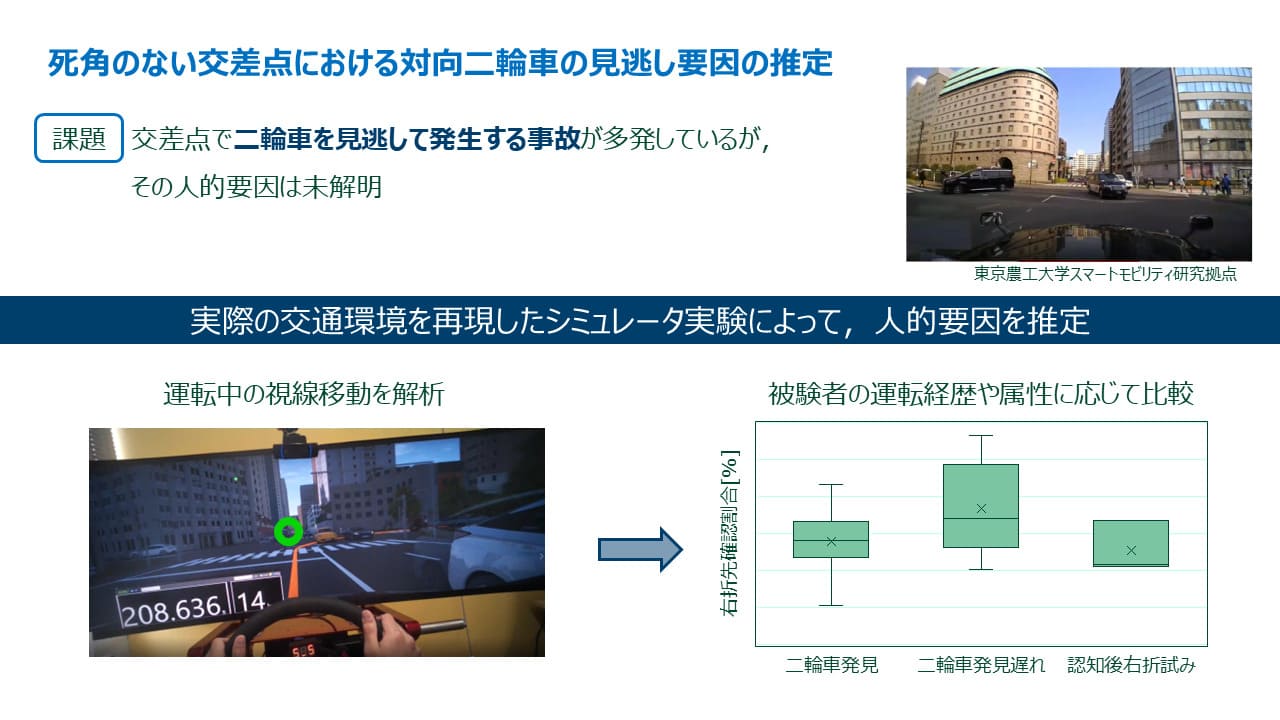
交差点右折時における対二輪車事故防止対策の研究
さらなる二輪車事故防止対策の構築を目的として、本研究では事故件数が最も多い直進二輪車と右折四輪車による右直事故に着目し、リアルワールドの交通ヒヤリハットデータベースを対象とした分析を行っている。
さらに、四輪運転者の運転行動を定量的に把握するため、データベース分析から抽出したヒヤリハット事例に基づき、該当する交通環境をドライビングシミュレータ上で再現している。
被験者実験を通じて視線行動や運転操作等のデータを解析することで事故発生要因の理解を深化させ、二輪車視点に基づく防衛運転方策の創出を目指している。
参考:
鈴木 智仁,藤波 洋平,Pongsathorn Raksincharoensak, 交差点における対二輪車衝突事故防止対策に関する研究, 第26回計測自動制御学会 システムインテグレーション部門講演会,No.1C1-17,広島,2025年12月10日~12日.
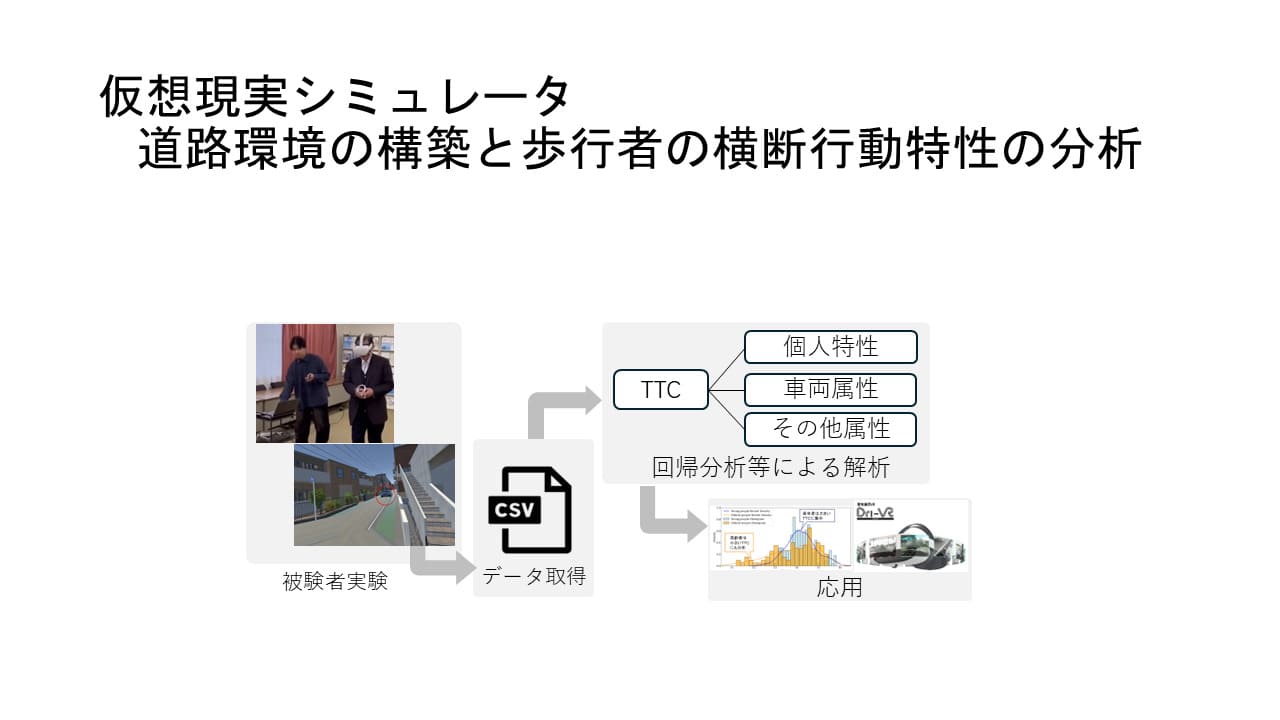
仮想現実シミュレータ
道路環境の構築と歩行者の横断行動特性の分析
本研究では、高リスクな横断場面を安全に体験できる環境を提供し、高齢歩行者の判断や行動特性を理解・教育することを目的として、実在する道路環境をUnityで再現したVR横断シミュレータを開発した。
被験者はHMDを装着した状態で実際に歩行しながら横断の可否を判断し、横断開始タイミングや歩行速度などの行動データを取得した。
取得したデータからTTC(衝突までの時間)に基づく危険度を算出し、統計解析を行った結果、危険な横断行動は年齢そのものよりも、視力特性やVR環境および接近車両のリアリティ、横断中の歩行速度に影響されることが明らかとなった。また、VRのリアリティを高めることで、危険行動が抑制される傾向が確認された。
本研究で構築したVR基盤は、高齢者のリスク認知を高めるための横断教育への応用が可能であるとともに、個人特性を考慮した横断判断モデルの構築にも有効である。これにより、交通安全施策の高度化に加え、ADASや自動運転システムにおける歩行者行動の理解・評価への貢献が期待される。
参考:
Xingguo Zhang, Hiraki Watanabe, Xun Shen, Pongsathorn Raksincharoensak, Effect of an On-road Crossing Warning System on Pedestrian Safety Using a Virtual Walking Simulator Device, Proceedings of 7th International Symposium on Future Active Safety Technology Towards Zero-Traffic-Accidents (FAST-zero’23), Kanazawa, Japan, 9 November 2023.
ドライブレコーダー映像を活用した一時停止交差点における出会い頭事故の解析
近年、ドライブレコーダーと連動した自動車保険商品が登場し、ドライブレコーダーから取得した走行データを活用することで事故を未然に防ぐテレマティクス自動車保険が普及している。
事故のない安全安心なモビリティ社会の実現に向けて、「事故のあとの保険から事故を起こさない保険へ」という新しい概念のもと、ドライブレコーダーによって収集された交通ビッグデータを最大限に活用し、交通事故の予兆検知や交通事故未然防止につながるサービスをモビリティ社会に提供することが求められている。
本研究では、交通事故防止のための次世代運転支援システムの開発につなげることを目的として、損害保険会社が保有するテレマティクスデータを活用し、一時停止交差点における対四輪車事故の実態を分析した。
具体的には一時停止交差点通過時の速度パターンや画像処理による交差車両出現位置の解析を行った。さらに、衝突被害軽減ブレーキ (AEBS)が作動された場合のシミュレーションにより事故低減効果を定量的に推定した。
参考:
Pongsathorn Raksincharoensak, 北條 陽子, 関 虎太郎, 張 興国, 阿賀 正己, 山崎 翔太郎,ドライブレコーダー映像を活用した一時停止交差点における出会い頭事故の解析
2025年自動車技術会春季大会学術講演会, 横浜, 2025年5月21日, No.141.
阿賀 正己, 北條 陽子, Pongsathorn Raksincharoensak, 山崎 翔太郎, 永井 正夫,車対車の信号なし交差点出会い頭事故におけるタクシードライバ・一般ドライバの行動比較,2025年自動車技術会春季大会学術講演会, 横浜, 2025年5月21日, No.142.
COPYRIGHT ©2019 PONGSATHORN LAB. ALL RIGHTS RESERVED.
ページトップへ